Coordinate Frames in Robotics
The robot coordinate frame is indicated with the subscript r. We can envision this coordinate frame as being attached to the base of the robot so that the origin of the frame moves as the.
Representing Robot Pose The Good The Bad And The Ugly Paul Furgale
By attaching coordinate frames to.

. A coordinate frame is defined as a point and two orthonormal base vectors xaxis yaxis. Pushing forward moves the robot and in a sense the teleoperator forward and back moves it back. What fixed point on the object or environment should the coordinate frame be applied to.
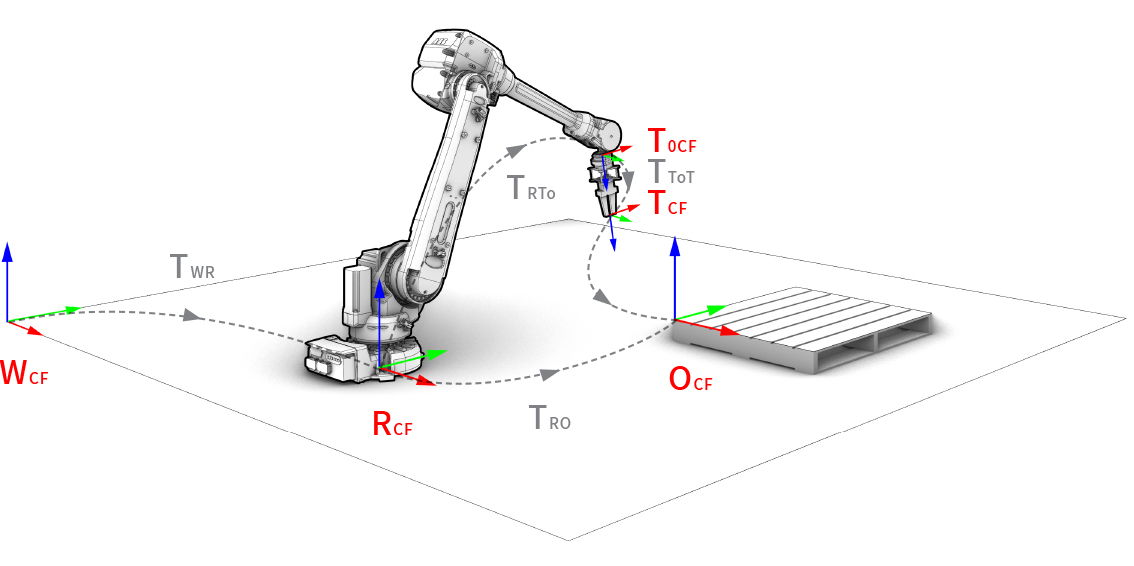
Coordinate frames are a set of orthogonal perpendicular axes attached to a body in order to describe the position of things relative to that body. When applying a coordinate frame to an object or environment two decisions must be made. The pose of a mobile platform relative to the map frame should not significantly drift.
Lecture 8 Part 2 Robotics University CourseTopics CoveredCoordinate Frame in RoboticsMapping in Robotics translation rotation and their combinationHi. Robot Coordinate Frame The robot coordinate frame for a mobile base is chosen such that the x-axis points forward the y-axis points to the left and the z-axis points upwards. The robot coordinate frame RCF base_link in ROS convention has its origin in the base of the robot and is the reference system for the mechanical buildup of the robot.
Object coordinate frame OCF Coordinate frame convention of a robotic setup. User frames allow you to align the x y z coordinate system about a fixture or workpiece that is translated andor rotated with respect to the world frame of the robot. The robot coordinate frame is indicated with the subscript r.
The coordinate frame called l_gripper defines the position and orientation of the left arm end effector. Frame Assignment For Robotic Manipulators - Direct Kinematics I This video shows how to assign frames coordinate systems to the joints in any robotic system. This coordinate frame has the advantage of being easy to define.
The coordinate frame called map is a world fixed frame with its Z-axis pointing upwards. In the particle filter project we are introducing an additional coordinate frame called map. We can envision this coordinate frame as being attached to the base of the robot so that the origin of the frame moves as the.
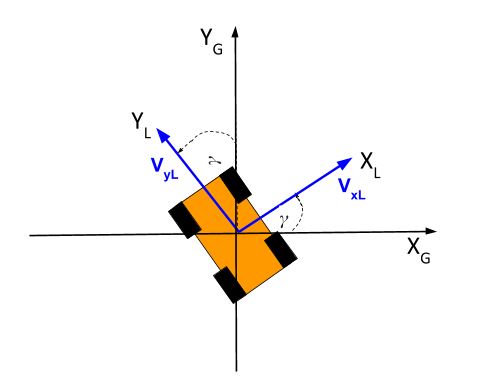
If the end effector is a grasping device the frame should be located at the. The map frame is defined in terms of a map that our particle filter code is given. If in 2D the origin of a body moves by translation mathbft in its original reference frame and rotates by angle R Rtheta then the transformation that converts positional coordinates.
2
Compas Fab 1 2 Coordinate Frames
How To Describe The Rotation Of A Robot In 3d Automatic Addison
Coordinate System Frames In Industrial Robots Patti Engineering
No comments for "Coordinate Frames in Robotics"
Post a Comment